

“省エネ”に適ったサイボーグ昆虫が誕生、このような技術は非暴力に背いていないか?
読者の方からの情報です。
本命は、
監視と戦いと偵察でしょうか
超薄型の太陽電池を装着し、人間がリモート操作で昆虫の動きを制御できると言います。一から昆虫型のロボットを作るよりも、サイボーグ昆虫にした方が「省エネ」なのだそうです。また、災害時の救命活動に役立てると聞けば良いことのような錯覚を起こしますが、このニュースに接した人の感想は多くが懐疑的です。生きた昆虫に装置を背負わせ、人間の思惑通りに動かすという傲慢さには耐えがたいものがあります。
たとえそれが人間に役立つ目的のためであってもヤマ・ニヤマの「非暴力」に大きく背くのではなかろうか? その上、そもそもその目的自体が怪しい。このような技術を弄する者たちが健全な目的で利用するだろうかと思うとゾッとします。DFR様が「監視」と書かれていましたが、まさしく生きた盗聴器として昆虫たちの寿命が尽きるまで利用しそう。
“サイボーグ昆虫” 理研など開発 昆虫に電子部品付け遠隔操作
発表したのは、理化学研究所の福田憲二郎専任研究員などの研究グループです。
「サイボーグ昆虫」は、昆虫の体に電子部品をつなぐことでその動きを操作できるようにするもので、世界的にも研究が進められています。
研究グループは、体長6センチほどの「マダガスカルゴキブリ」の体に厚さ4マイクロメートルという食品用のラップより薄い太陽電池や無線機器などを取り付け、腹部にある「尾葉」と呼ばれる感覚器官に電気刺激を与えることで進む向きを変える実験に成功したということです。
研究グループは、将来的には、小型カメラやセンサーを組み合わせることで、人間が立ち入るのが難しいがれきの中での捜索や、有害なガスが発生している災害現場での活動などに応用できるのではないかとしています。
(以下略)
マイコメント
ゴキブリの背中にIC基盤を乗せて自由に行動をコントロールすることに成功したと報道
されていますが、将来的には背中に乗せたゴキブリの数倍もありそうな基盤はいずれ数ミリ
程度のものに改良されるでしょう。
そうなると、ゴキブリはほとんど空を飛びませんがセミやバッタ、あるいはカブトムシなどに
装着して自由に空を飛ばせ、監視カメラで撮影するということも可能になるでしょう。
そう考えると災害時の捜索だけでなく街中の歩く人々の監視にも転用できることが明らかです。
従って、こちらの方が本来の目的でしょう。
いったい、数年後にはそのような世界が現出するのか?
再充電可能なサイボーグ昆虫
研究手法と成果
本研究では、体長約6cmのマダガスカルゴキブリ(Gromphadorhina portentosa)[3]の背側に電子デバイスを取り付けました(図1左)。デバイスのうち、無線移動制御モジュールとリチウムポリマー電池は柔らかいバックパックを介して、昆虫の胸部背側の曲面に沿って取り付けました。厚さ4マイクロメートル(μm、1μmは1,000分の1mm)の超薄型有機太陽電池モジュールは腹部背側に取り付けました。
無線移動制御モジュールとリチウムポリマー電池を取り付けるためのバックパックは、マダガスカルゴキブリの正確な3Dモデルを基に設計し、弾性ポリマーを3Dプリントして作製しました。バックパックの昆虫と接する側は、胸部背側の曲面形状と一致する柱状構造に設計しました(図1右)。このような柱状構造によって昆虫の個体間の形状の違いによらず、曲面に完全にフィットし、硬い電子デバイスを安定的に実装できました。この接着は、繁殖環境において1カ月後でも維持されました。
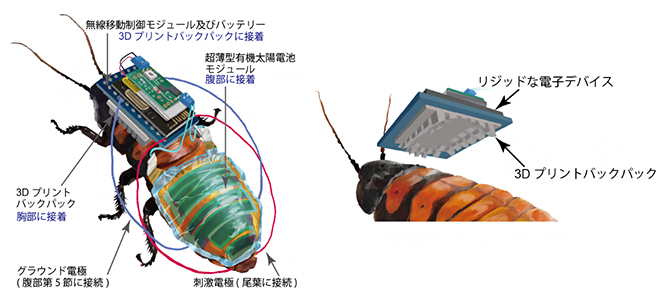
図1 サイボーグ昆虫の概要と3Dプリントバックパック
- (左)昆虫の腹部背側に超薄型有機太陽電池モジュールを接着させ、胸部背側に無線移動制御モジュールおよびバッテリー(リチウムポリマー電池)を柔らかいバックパックを介して接着させた。移動を制御する刺激信号を昆虫に入力する刺激電極は、銀ワイヤを用いて尾葉と呼ばれる感覚器官に接続している。
- (右)3Dプリンターで作製した柔らかいバックパックは、昆虫の胸部背側の曲面形状から抽出した柱状構造を持ち、昆虫が持つ個体差を許容してさまざまな個体上で電子デバイスを安定的に実装できる。
また、超薄型有機太陽電池モジュールの取り付けのため、昆虫の腹部断面を観察したところ、腹部の変形中に腹部節が部分的に重なっていることが分かりました。そこで、腹部の動きの自由度を確保するため、ポリマーフィルム(フィルム)上に作製された超薄型有機太陽電池を、接着剤領域と非接着剤領域を交互に配置する「飛び石構造」で昆虫の腹部背側へ貼り付けました(図2)。
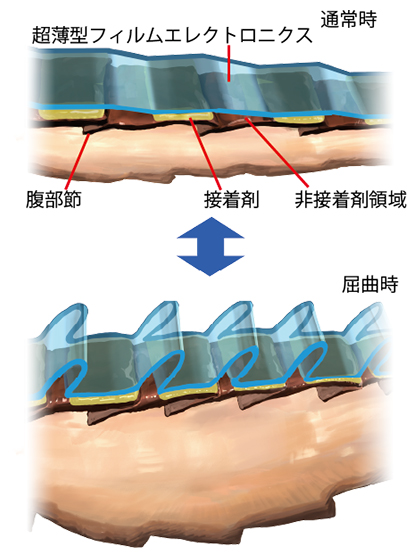
図2 超薄型有機太陽電池の腹部実装
接着剤領域と非接着剤領域から成る飛び石構造を利用することで、フィルムに変形自由度が残り、腹部の屈曲時にフィルムを外側に曲げることができる。
この方法の有効性を、障害物を通過するのに必要な時間によって定量化しました(図3)。昆虫腹部にフィルムが取り付けられていない場合は中央値2.4秒で通過したのに対して、腹部背側の腹部節が厚いフィルムで固定されていると、障害物を通過するのに必要な時間が長くなりました(中央値4.2秒)。一方、飛び石構造で厚さ3μmのフィルムを接着した場合は、フィルム無しの場合とほぼ同じ移動時間(中央値2.2秒)でした。この結果は、今回開発したフィルム実装方法が昆虫の動きの自由度を確保できることを示しています。
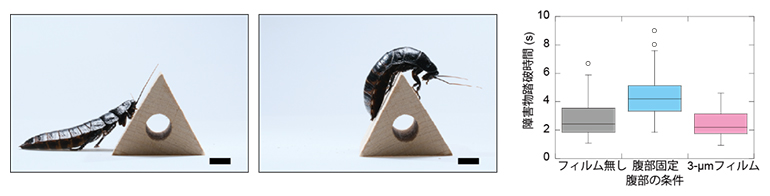
図3 障害物踏破試験
腹部のフィルムの有無を変えて、障害物踏破に必要な時間を測定した。腹部を厚いフィルムで固定した場合は踏破時間が有意に長くなる一方、飛び石構造で厚さ3μmのフィルムを実装した場合には、フィルム無しの場合とほとんど同じ踏破時間を示した。スケールバーは10mm。
さらに、起き上がり能力(地面の上でひっくり返った状態の昆虫が元の態勢に戻ることができるかどうか)を評価することで、この方法の有効性を検証しました(図4)。フィルム無しの昆虫の起き上がり成功率は99%でした。フィルムを飛び石構造で腹部背側に取り付けた場合は、厚さ5μmと10μmのフィルムの起き上がり成功率はそれぞれ96%と81%でしたが、厚さ15μmと20μmのフィルムでは、それぞれ46%と16%に低下しました。また、厚さ2μmのフィルムを飛び石構造無しで腹部に接着した場合は、起き上がり成功率は10%でした。これらの結果は、十分に薄いフィルムと飛び石構造の組み合わせが昆虫の運動性を保持することを示しています。
また、厚さ4μmの超薄型有機太陽電池モジュールを取り付けた際は、100%の起き上がり成功率を示し、超薄型有機太陽電池モジュールが昆虫の動きを完全に確保することを確認しました。以上の結果から、昆虫腹部には一定以下の柔らかさの超薄型電子素子を用いることで昆虫の基本的動作が実現可能であることが明らかになりました。
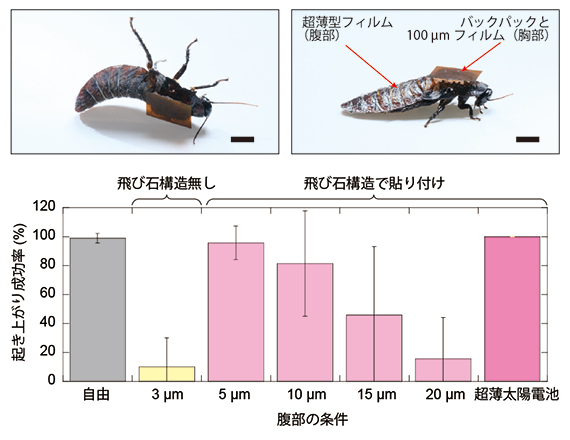
図4 起き上がり試験
- (上)背側にフィルムを取り付けたマダガスカルゴキブリを逆さまの状態で地面に置き、60秒以内に通常の状態に起き上がれるかどうか評価した。スケールバーは10mm。
- (下)腹部にさまざまな条件でフィルムを貼り付けた際の成功率。
次に、超薄型有機太陽電池モジュールの出力を調べたところ、昆虫腹部の曲面形状の有効面積を最大化することで、最大17.2mWの高出力を実現できることが分かりました(図5)。モジュールの有効面積は3.96cm2であり、これは腹部面積に対する開口率[4]51%に相当します。超薄型太陽電池の有効面積当たりの重量は約5g/m2であり、曲面上での重量当たりの電力は8.69W/gに相当します。
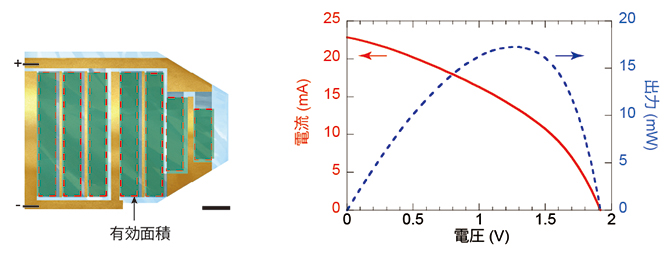
図5 サイボーグ昆虫用超薄型有機太陽電池モジュール
- (左)モジュールのデザイン。昆虫腹部の曲面に沿って超薄型有機太陽電池を配置した。赤破線で囲まれた領域が有効面積。三つの単一セルを直列につなぎ、それを二つ並列につなげるようにした。スケールバーは5mm。
- (右)超薄型有機太陽電池モジュールの昆虫曲面モデル上での電流-電圧特性(赤実線)と出力-電圧特性(青破線)。
最後に、生きたサイボーグ昆虫を用いて、充電と無線移動制御を実際に検証しました(図6)。まず、バッテリーを完全に放電し、充電する前に刺激信号が加えられていないことを確認しました。疑似太陽光をサイボーグ昆虫上の有機太陽電池モジュールに30分間照射した後、充電されたバッテリーからの電力を利用し、刺激オン・オフを制御する信号をサイボーグ昆虫に無線受信させ、約2分間にわたって昆虫尾葉に接続した刺激電極へ刺激信号を入力しました。この間、右方向への移動制御を複数回試行し、無線制御が繰り返し成功したことを確認しました。
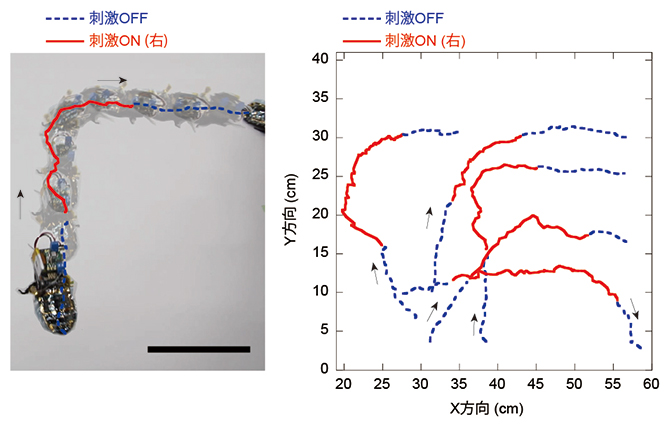
図6 再充電可能なサイボーグ昆虫の無線通信による行動制御
- (左)多重露光写真とそれに対応する移動の軌跡。青破線と赤実線は、それぞれ刺激信号オフおよびオンのタイミングを表している。スケールバーは10cm。
- (右)5回の移動制御試行の軌跡。
引用→https://www.riken.jp/press/2022/20220905_2/index.html


コメント